Zamknij







Twórz ostre i kolorowe nagrania nawet przy słabym oświetleniu. Czujnik Starvis CMOS SONY IMX307 z efektywnym obszarem światłoczułym doskonale nadaje się do widzenia w nocy. W ciemności automatycznie dostosuje i zoptymalizuje oświetlenie przed nagrywaniem.
Kamera samochodowa Full HD 1080P i zaawansowana kompresja zapisu kodowania wideo znacznie poprawiają jakość obrazu.
130-stopniowe pole widzenia obejmujące cztery pasy ruchu zapewnia lepszą widoczność.

Kamera samochodowa automatycznie rozpocznie nagrywanie w przypadku wykrycia kolizji przez wbudowany czujnik G. Przypomni Ci o sprawdzeniu filmu z wydarzenia, gdy wrócisz do samochodu.
*Wymagany adapter zasilania Hardwire Kit UP02 70mai do trybu monitoringu parkowania i jest sprzedawany oddzielnie.

Aplikacja 70mai obsługuje zarówno systemy IOS, jak i Android, umożliwiając przeglądanie i pobieranie wideo HD
Wi-Fi w czasie rzeczywistym. Zablokuj także awaryjne wideo w „Pliku zdarzenia”, aby zapobiec nadpisaniu.
Technologia WDR może regulować balans ekspozycji, umożliwiając kamerze uchwycenie większej liczby szczegółów i przetworzenie większej ilości światła na matrycy, a także uzyskanie bardziej żywego obrazu.
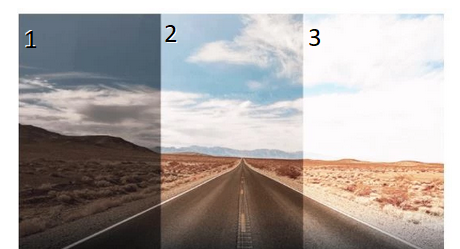
1 niedoświetlenie
2 WDR
3 prześwietlenie zdjęcia

Zaprojektowany tak, aby pasował do każdego wnętrza samochodu i doskonale ukryty za lusterkiem wstecznym.
Automatyczne nadpisywanie starszych nagrań najnowszymi, aby zaoszczędzić miejsce na karcie pamięci micro.
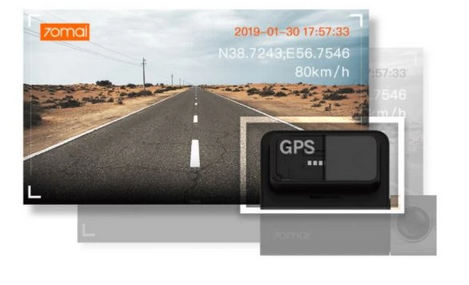
* Wyświetlanie prędkości i współrzędnych GPS jest dostępne tylko z modułem GPS, który należy zakupić osobno.

| Marka | 70MAI |
| Indeks | 32558 |
| Model | Midrive D08 |
| Gwarancja dla firm | 24 miesiące |
| Gwarancja | 24 miesiące |
| Krótki opis | Kamera samochodowa Full HD 1080P i zaawansowana kompresja zapisu kodowania wideo znacznie poprawiają jakość obrazu. |
Do tego produktu nie dodano jeszcze żadnej opinii. Bądź pierwszy i podziel się wrażeniami.
Dlaczego warto pisać opinie?
Zapewniamy
montaż
Ogólnopolska
sieć sklepów
Doradztwo
i pomoc
Bezpieczne
zakupy
Nie ma żadnych pytań dotyczących tego produktu.
check_circle
check_circle





